

1 引言
一方面,随着高速铁路的不断发展,人们对高速动车组安全性、舒适性的要求越来越高;另一方面,为了实现动车组的节能环保,电制动越来越受到关注。这些都要求动车组牵引传动系统在整个运行速度范围内具有更高的控制性能,要求在全速度范围内准确、及时地检测到动车组的行进速度及牵引电机的转速。
然而,动车组一般采用电磁原理测量齿轮的转速传感器,其分辨率通常很低,这给快速、准确的牵引电机转速测量带来了困难,对低速区的转矩牵引电机控制性能影响尤为显著,比如转矩输出不平稳、再生制动力不足等[1]。
关于低速区电机转速的估计,学者们已提出了多种方法,如瞬时速度观测器法、高频谐波注入法[2]和卡尔曼滤波法[3]等。文献[1]中观测器的极点需随转速不同进行调整才能保证观测器稳定工作,而且存在一些情况,即使按照稳定性判据设置极点也不能保证观测器的稳定性。高频谐波注入法中,用于信号分离的多个滤波器会造成转速估算的滞后,动态性能较差。卡尔曼滤波法计算量大,且计算中用到电机参数,参数测量不准确将导致系统性能下降。根据电动车组的实际运行特点,本文针对动车组测速系统的特点,提出了一种基于曲线拟合的转速估计方法,该方法不需要改变系统硬件配置,而且转速估计的精确度不受牵引电机参数变化的影响。仿真研究和实验结果验证了该方法的正确性。
2 动车组的测速方法
2.1 动车组测速传感器型
图1
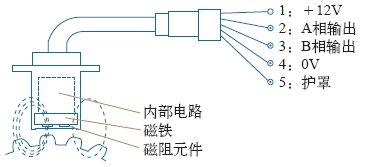
图2
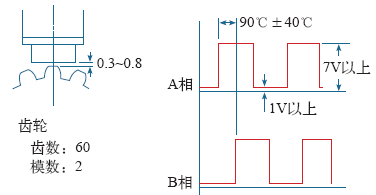
由动车组测速原理可知,转子旋转一周的过程中,速度传感器输出的脉冲数跟齿轮的齿数具有对应关系。
2.2 动车组测速方法
数字控制系统中,常见的测速方法有三种:M法、T法和M/T法[5]。三种测速方法的基本原理如下所示。
2.2.1 M法测速
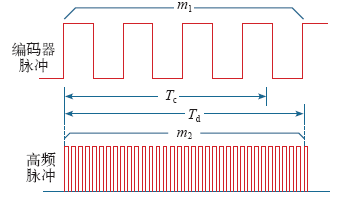
M法测速是在设定的检测时间内,对转速编码器输出的脉冲进行记数,并根据该检测时间和脉冲计数结果计算电机转速,原理如图3所示。
图3
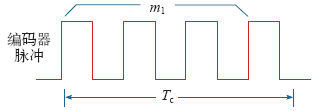
设检测时间为Tc,检测到的脉冲数为m1,编码器每转输出脉冲个数为P,则

2.2.2 T法测速
T法测速是在测速编码器输出的相邻脉冲时间间隔内对已知频率的高频脉冲计数,并根据计数结果计算电机转速,原理如图4所示。
图4
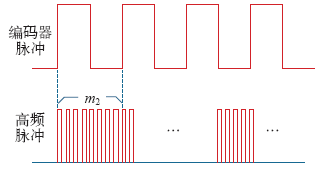
设高频脉冲频率为fc,在相邻脉冲时间间隔内高频脉冲个数为m2,编码器每转输出脉冲个数为P,则电机转速为

2.2.3 M/T法测速
M/T法测速是M法和T法测速的综合和改进,基本原理是:在稍大于设定检测时间Tc的时间Td内,分别对编码器输出脉冲和高频时钟脉冲计数,计数结果分别为m1和m2,原理如图5所示。根据测速原理可知,电机转速为
图5
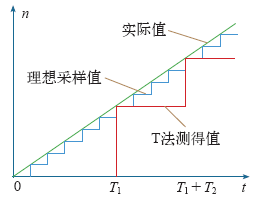
分析上述三种测速方法:M法测速中,设定检测时间内编码器输出脉冲个数一般不是整数,而计数器测得的m1必须为整数,因而存在量化误差。转速越高,则m1越大、量化误差越小,所以M法测速较适于高转速测量。T法测速中,高频时钟脉冲频率远高于编码器脉冲频率,且转速越低所得计数值m2越大、量化误差越小。故T法测速适合低转速测量。M/T法测速是前两者的结合,在全速度范围内都能保证转速测量精度。所以,M/T、T法测速都适于低速测量。但转速极低时,由于编码器输出的相邻脉冲时间间隔大于控制周期,此时虽然测速值仍然准确,但实时性差,导致控制系统动态性能下降。
3 基于曲线拟合的转速估计方法
3.1 低速区传统T法测速的缺陷
3.1.1 转速测量延时
图6
电动车组中,牵引电机转速n(r/min)与动车组速度v(km/h)的关系

式中,i为动车组传动比;D为动车组轮径(m)。
若采用T法测速,编码器相邻脉冲时间间隔为
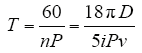
式中,P为转速编码器每周输出的脉冲数。
3.1.2 转子磁场定向误差
间接矢量控制中,转子磁场位置角
式中,fR、fsl分别为转子角频率和转差频率。
转子角频率是根据转速计算而得,由式(6)可知,转速的测量误差将引入转子磁场定向的误差。可见,要想准确进行转子磁场定向,提高系统的控制性能,低速区的转速估计是必要的。
3.1.3 降低转速控制的性能
从上面的分析可知,齿轮传感器的速度检测需要一定的时间,如果这个时间大于控制周期的话,速度采样就存在时间延时,而这个延时时间随着速度的变化而变化;另一方面,从T法测速计算原理来看,速度测量值针对一段时间内速度的平均值,有别于采样时刻速度实际值。所以,速度测量过程是一个非常复杂的非线性过程,为了简化分析,假定电机速度恒定,只需要考虑采样延时问题。
考虑转速测量的延时问题,即在控制系统中加入一个滞后环节后,控制系统的频域响应将发生变化,随着滞后时间的增大,系统性能越来越差。而且在电机动态加速或减速运行过程中,这个延时时间一直变化,使得整个控制环路随速度变化而变化,这必然增加转速环的参数不确定性,导致了转速环的控制性能下降。
由此可见,速度测量的延时改变了控制环路的传递函数,降低了控制环路的性能,所以要提高控制性能,就必须解决速度测量的延时问题[4]。
3.2 一种新型转速估计方法的提出
由魏尔斯特拉斯(Weierstrass)定理[8]可知,连续函数f (x) ∈ C[a,b]的任一元素均可用有限维p(x) ∈ Hn逼近,使误差max|f (x) - p(x)|<ε(其中,x ∈ [a,b],ε为任给小正数)。Hn为次数不超过n的多项式集合,其元素表示为p(x) = a0 + a1x1 + … + anxn。
由于在动车组实际运行中,牵引电机转速变化是连续的,所以本文尝试采用曲线拟合的方法实现转速的估计。
为了兼顾转速估计的准确度和计算量,本文选用二次多项式对转速进行拟合:根据T法测速得到的3个准确转速值作为参考点得到拟合曲线,然后根据所得曲线估计当前时刻的转速,如图7所示。
图7
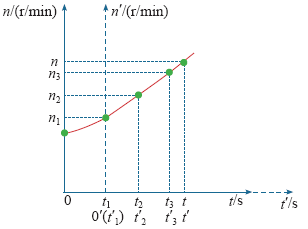
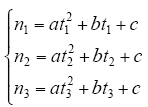
3个参考点转速分别为n1,n2,n3,对应时刻分别为t1,t2,t3,当前时刻为t。设所得拟合曲线为y = ax2 + bx + c,则有
根据此方程求出待定系数a,b,c,再将当前时刻t代入所得拟合曲线,即可得到当前时刻的转速估计值:n = at2 + bt + c。当T法测速测得下一准确速度时,更新t1,t2,t3和n1,n2,n3,计算新的a,b,c,进入下一编码器脉冲间隔的转速估计。
为了减小计算量、防止时间值超出变量的表示范围,软件设计中始终以第一个参考点对应的时刻作为时间轴原点,时间轴随着下一个速度参考点的到来右移,则t1′ ≡ 0,t2′ = t2 - t1,t3′ = t3 - t1。如图7中带上标“′”的时间轴所示。
可以看出,该转速估计方法的准确性只取决于前三个参考点数据的准确性,而与牵引电机或电动车组的参数无关。间接矢量控制中,转子磁场定向是根据转子角频率和转差频率计算得到的,磁场定向的准确度也随着转速测量准确度的提高而提高。
4 Matlab/Simulink仿真研究
图8
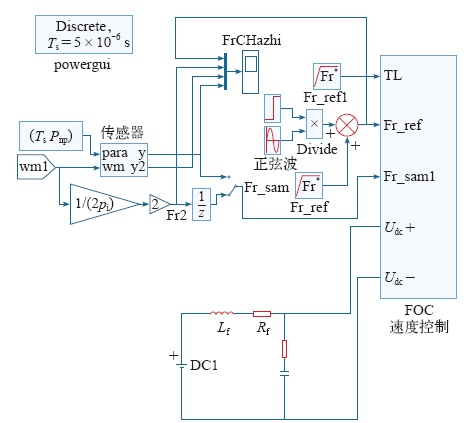
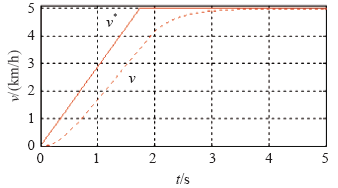
仿真中,速度给定值采用图9中实线所示的斜坡给定方式,给定速度为5km/h,只考虑基本阻力时的仿真结果。
图9
4.1 牵引电机转速测量误差比较
图9为起动过程中电动车组速度跟踪曲线,实线、虚线分别为速度给定值和实际值。由图可见,电动车组运行速度能够快速地跟踪给定值,静态误差为零,且加速度大小在允许范围内。
如图10所示,error1、error2分别是采用转速估计前后的转速测量误差。可以看出,在动车组速度调节的动态过程中,转速估计的效果尤其显著,转速测量误差减小到原来的1/10,几乎为零。
图10
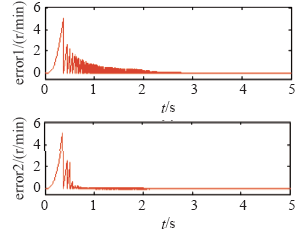
起动最初,转速估计的测量误差也很大,这是因为此时控制系统还没有得到最早的3个参考点数据,即还没有开始进行转速估计。在低速时T法测速存在滞后,但测量值准确;而且稳态时电机转速基本没有波动,故此时采用转速估计与否对转速测量误差影响不大。
4.2 转子磁场定向准确度的提高
间接矢量控制中,转子磁场位置通过转子角频率和转差频率计算得到,所以转速测量的准确性会影响定向的准确性。动车组起动之初,由于控制系统未获得参考点数据,没有进行转速估计,所以造成磁场定向的误差,控制系统需对此进行补偿。图11中,φ1,φ2分别为采用转速估计、转子磁场定向误差补偿前后的转子磁场定向情况。其中,实线和虚线分别为转子磁场位置的实际值和计算值。
图11
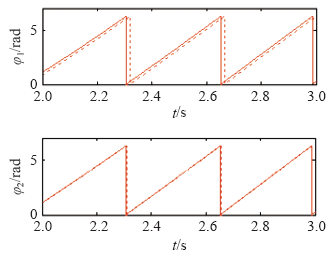
非常明显,不采用转速估计和起动转子磁场定向误差补偿时,转子磁场位置计算值与实际值存在较大误差。当采用了转速估计和补偿后,误差大大减小,计算值与实际值基本重合,误差小于0.002rad。
5 实验结果
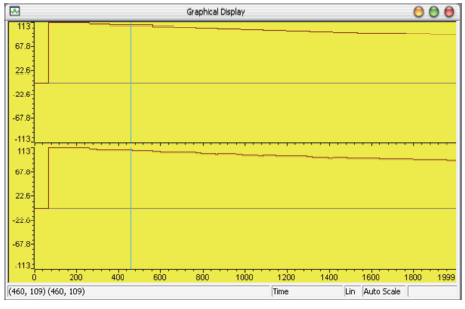
为了验证所提转速估计方法的可行性,根据上述方法进行了软件设计并在交流传动互馈试验台上进行了试验。在C2000 Code Composer中观测T法测速和转速估计值结果(取2 000个采样点)。
在图12中,上方为传统T法测速所得结果,下方为曲线拟合估算法所得结果。可以看出,由于速度过低,传统T法测速结果更新慢,在较长时间内维持固定值;而曲线拟合估算法在两次T法测速结果之间可以得到估算值,且当T法测速结果更新时,估算结果与测量结果基本相等,这说明文中所提的方法具有较高精度,而且本方法不受电机参数变化的影响,实用性较强。
图12
6 结论
针对动车组测速系统的特点,本文在传统T法测速的基础上提出了一种基于曲线拟合的动车组用异步牵引电机转速估计的方法,该方法对低速区及动态过程中的电机转速估计效果显著,且转速估计准确度不受电机参数变化的影响。同时,通过转速估计也可大大提高间接矢量控制中转子磁场定向的准确度。采用转速估计和转子磁场定向误差补偿后,转子磁场位置角计算值与实际值误差小于0.002rad。仿真和实验结果验证了该方法的正确性和有效性。
参考文献
Precise torque and speed control in pure electric braking operation of AC traction in low speed range
[C].
Improvement of low speed characteristics of railway vehicle by sensorless control using high frequency injection
[C].
A new motor speed estimator using kalman filter in low-speed range
[J].DOI:10.1109/41.510642 URL [本文引用: 1]
基于线性插值的动车组牵引电机速度估计方法
[J].
Speed estimation for induction motor of electric multiple unit based on linear interpolation
[J].
发动机试验中转速的数字测量方法
[J].
The numeric measurement of rotative velocity in the engine test
[J].
先锋号电动车组制动力分析研究
[J].
DOI:10.3233/WOR-193064
URL
PMID:31868718
[本文引用: 3]

The Screening of risk factors for sleep apnea among drivers with safety-sensitive jobs is considered as an issue of utmost importance in a safe transportation system.
Analysis and study in braking force for xianfeng electric motor train unit
[J].
DOI:10.3233/WOR-193064
URL
PMID:31868718
[本文引用: 3]
The Screening of risk factors for sleep apnea among drivers with safety-sensitive jobs is considered as an issue of utmost importance in a safe transportation system.
先锋号电动车组转向架结构性能简析
[J].
DOI:10.3233/WOR-193064
URL
PMID:31868718
[本文引用: 2]
The Screening of risk factors for sleep apnea among drivers with safety-sensitive jobs is considered as an issue of utmost importance in a safe transportation system.
Analysis of the bogie's structure and performance of xianfeng's electric trainset
[J].
DOI:10.3233/WOR-193064
URL
PMID:31868718
[本文引用: 2]
The Screening of risk factors for sleep apnea among drivers with safety-sensitive jobs is considered as an issue of utmost importance in a safe transportation system.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}