


1 引言
电磁感应现象是电磁学的核心问题。导体在磁场中运动会产生电动势,即动生电动势,其大小为E = BLv,与磁场的大小及导体运动的速度成正比[1,2,3]。测量电磁感应现象产生的动生电动势对电磁测量、电工技术及电子技术具有重大的意义。文献[4]公开了一种动生电动势测定仪,这种测定仪的测量范围较窄,只能测量几十伏的动生电动势,且线圈运动过程中的速度不能直接显示,测量结果不够直观明了;文献[5]提出一种导体在匀强磁场中平动产生动生电动势的测量仪器,不仅不能直观地显示导体的运动速度,而且不能完整地测量导体正向、反向运动产生的动生电动势,测量过程比较繁琐且测量结果误差大,精度低[5]。随着磁感应现象的普遍应用,对动生电动势测量装置的测量精度的要求不断提高,并且希望设计一种测量过程自动化的装置,因此对电磁环境下动生电动势的智能测量装置的设计需求迫切[6]。
2 测量装置设计原理
电磁环境下动生电动势的智能测量装置包括动生电动势产生部分、5引脚的SPDT继电器、倒相器和精密峰值电压表四部分。动生电动势产生部分的一端与5引脚的SPDT继电器、倒相器和精密峰值电压表依次连接;动生电动势产生部分的另一端直接与精密峰值电压表连接。连接方式如图1所示。
电磁环境下动生电动势的智能测量装置的工作原理及流程是将电机固定在小车上,矩形线圈粘贴在小车上,矩形线圈在电机驱动下往返于电磁环境下起点和终点画有黑线的白纸跑道上,电机的正反转,即线圈的正向、反向运动由单片机控制处理模块的高、低电平信号控制。输入信号为00时表示截止状态,输入01时为正转,输入10时为反转,但不能高电平同时输入(其中1代表高电平,0代表低电平)。通过调节单片机控制处理模块产生的占空比可变脉冲信号改变脉冲宽度以控制电机的转速。通过单片机控制处理模块的另外两个接口电位的高、低控制线圈的运行速度。在其运动过程中,光敏二极管和发光管构成光电传感器,检测矩形线圈往返运动跑道上的标记黑线,进而产生高、低电平信号输送到单片机控制处理模块中,其中单片机控制处理模块的一个外中断口负责接收路标检测产生的脉冲,并同时记下检测到起点和终点黑线时的相应时间,单片机控制处理模块对输入的信号进行分析,从而实现往返速度的计算功能,并由显示模块进行显示,往返速度的显示通过共阴型的数码管实现。
图1
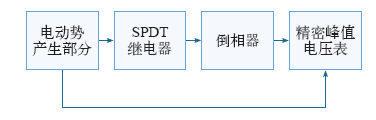
图1
动生电动势的智能测量装置结构框图
Fig.1
Structured flowchart of the motional electromotive force intelligent measuring device
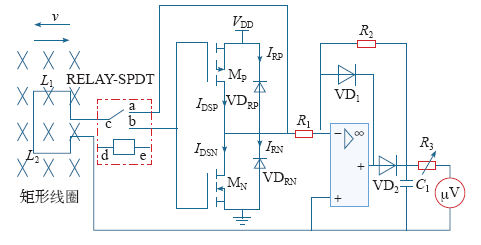
电磁环境下动生电动势的智能测量装置的总体电路原理图构成如下:矩形线圈的一端与5引脚的SPDT继电器的引脚c连接,另一端与精密峰值电压表的运算放大器的同向输入端口相连,倒相器由一个增强的n沟道MOS管,即MN管,和一个增强型p沟道MOS管,即MP管组成,且MN管和MP管的两栅极短接作为倒相器的输入端,该输入端与5引脚的SPDT继电器的引脚b相接,5引脚的SPDT继电器的d引脚和e引脚与单片机控制处理模块的两个输入端口连接,由单片机控制处理模块两个输入端口电位的高低,控制5引脚的SPDT继电器的状态。矩形线圈的长和宽分别为L1和L2,矩形线圈的速度为v,该矩形线圈动生电动势大小为E = 2BL2v;MN管和MP管的两漏极短接作为倒相器的输出端,该输出端与精密峰值电压表的电阻R1一端连接,MN管的源极接地,MP管的源极接电源电压VDD,这样矩形线圈的运动方向改变之后,动生电动势经过倒相器可以使相位反转180°;源二极管VDRP的输入端与漏二极管VDRN的输出端串联,源二极管VDRP的输出端接VDD,漏二极管VDRN的输入端接地,源二极管VDRP、漏二极管VDRN、MN管和MP管共同组成独立回路;5引脚的SPDT继电器,即RELAY-SPDT,由单片机控制处理模块输入端口电位的高低控制,当矩形线圈正向运动时,输入01,5引脚的SPDT继电器的刀开关与a引脚连接,即产生的动生电动势不需要经过倒相器,直接与精密峰值电压表的电阻R1连接;当矩形线圈反向运动时,输入10,5引脚的SPDT继电器的刀开关与b引脚,即倒相器的输入端连接,产生的动生电动势需经过倒相器使相位反转180°后,再输入精密峰值电压表,如图2所示。
图2
3 智能测量装置硬件设计
3.1 电动势产生部分
动生电动势产生部分包括单片机控制处理模块、电机驱动模块、显示模块、键盘输入单元、矩形线圈、线路检测模块和电机,矩形线圈与电机相连,电机输出端同时接键盘输入单元和线路检测模块,键盘输入单元和线路检测模块又分别与单片机控制处理模块相应输入端口连接,单片机控制处理模块输出端同时接显示模块和电机驱动模块;单片机控制处理模块控制电机运动,矩形线圈固定在电机所在的小车上,矩形线圈随小车在电磁环境下作往返运动,产生动生电动势,如图3所示。
图3
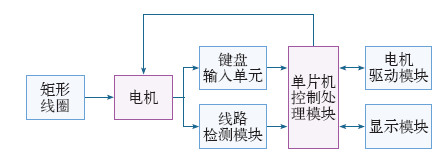
图3
智能测量装置动生电动势产生部分结构框图
Fig.3
Structured flowchart of the part of intelligent measuring device produced motional electromotive force
3.1.1 键盘输入单元
键盘输入单元用于输入单片机外部指令,通过键盘输入常量及命令使单片机完成相应的功能。
3.1.2 线路检测模块
线路检测模块主要由30u31光敏二极管VD7、9013型晶体管VT8和VT9及发光管VL3组成。线路检测模块的主要作用如下:光敏二极管和发光管构成光电传感器,主要用来检测矩形线圈往返运动跑道上起点和终点标记的黑线,产生高、低电平输送到单片机控制处理模块中,单片机控制处理模块对输入的信号进行分析,从而实现速度的调节及“停车”功能。线路检测模块检测到起点和终点的黑线时单片机控制处理模块将相应到达黑线的时间记录下来,并根据跑道的长度计算出往返速度,最终由数码管显示往返速度。线路检测模块的具体电路组成为:发光管VL3的输入端与电阻R8一端相连后接+5V电源,发光管VL3的输出端接地,VD7的发射极与+5V电源相连,VD7的集电极与VT8的基极相接,发光管VL3和光敏二极管VD7用来接收光信号,VT8的集电极与VT9的基极相连后又与电阻R9串联,最后接+5V电源,VT8和VT9的发射极均接地,电阻R10与VT9的集电极串联并接+5V电源,VT9的集电极和电容C3的一端均与单片机控制处理模块相应的引脚连接,C3的另一端接地,如图4所示,其中R8 = 300Ω,R9 = 10kΩ,R10 = 5.1kΩ,C3 = 0.47μF。
当电机输出为高电平时,VT8发射极接地,VT8导通。+5V电源经电阻R9为VT8提供集电极偏置电压,VT9基极为高电平,VT9发射极接地,使VT9导通,VT9集电极输出高电平送入单片机内,当电机输出为低电平,VT8发射极接地,VT8截止,VT8集电极输出低电平到VT9 基极,+5V电源经VT9集电极及电阻R10,给VT9 提供偏置电压,使VT9截止,VT9输出低电平送入单片机控制处理模块内,从而使单片机控制处理模块的输入脉冲发生高、低电平变化,低电平用作中断计数判断。
图4
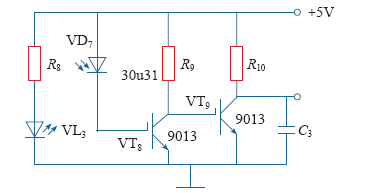
图4
智能测量装置的线路检测模块电路原理图
Fig.4
Circuit diagram of intelligent measuring device’s line detection module
3.1.3 单片机控制处理模块
单片机控制处理模块采用89C52单片机,为保证该单片机不受电机状态改变对单片机电源的影响,使用单独的电源对单片机进行供电,以确保单片机工作的稳定性。单片机内部计数器/定时器主要进行定时、计数功能,单片机串行输入/输出口RXD、TXD进行显示控制。
3.1.4 电机驱动模块
电机驱动模块,即大功率晶体管构成的桥式电路,通过单片机控制处理模块的高、低电平信号控制电机的正、反转,即矩形线圈的正向、反向运动。当在单片机控制处理模块中输入00时,电机为截止状态,当单片机控制处理模块输入01时,电机为正转,当单片机控制处理模块输入10时,电机为反转,但不能高电平同时输入,即不能输入11,电机的转速通过调节单片机控制处理模块产生的占空比可变脉冲信号,改变脉冲宽度来控制。
该电路的具体组成为:电阻R4、R5的一端接单片机控制处理模块,电阻R4的另一端与大功率晶体管VT1串联,大功率晶体管VT1的集电极与R6串联的一端相连,电阻R6的另一端与大功率晶体管VT3相连,VT3的发射极接+5V电源,大功率晶体管VT1的发射极与大功率晶体管VT6的基极相连;电阻R5的另一端与大功率晶体管VT2串联,大功率晶体管VT2的发射极直接与大功率晶体管VT4的基极相连,大功率晶体管VT4和VT6的发射极相连并接地,大功率晶体管VT2的集电极与电阻R7串联后,再与大功率晶体管VT5的基极连接,大功率晶体管VT3、VT4、VT5、VT6形成互补对称式电路,电路中间接一个小电容C2,用来消除电弧,如图5所示。
图5
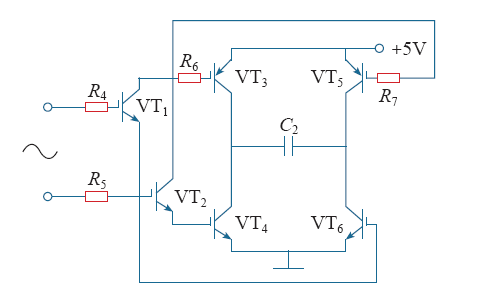
图5
智能测量装置电机驱动模块电路原理图
Fig.5
Circuit diagram of the motor driving module of the intelligent measuring device
3.1.5 显示模块
显示模块用来显示往返速度,显示模块采用数码管。动生电动势的大小为E = 2BLv,与矩形线圈的运动速度成正比,故需对线圈的运动速度进行显示。往返速度用四位数码管通过动态扫描的方式显示。
3.2 倒相器
倒相器包括NMOS管和PMOS管,倒相器的输入端与5引脚的SPDT继电器的引脚b连接,倒相器的输出端与精密峰值电压表的输入端即电阻R1的一端连接。在线圈运动方向改变之后,动生电动势经过倒相器实现相位反转180°。倒相器包括漏PN结VDRN、VDRP和阱衬底PN结及二极管VDW。VDW直接跨接在电源和地之间,形成独立回路,并不影响CMOS倒相器的输入输出特性,所以在等效电路中未画出。
3.3 精密峰值电压表
精密峰值电压表包括二极管整流电路、运算放大器和电容滤波电路,并由磁电系电压表指示。倒相器的输出端与精密峰值电压表的输入端相连。当精密峰值电压表的输入电压为正时,VD1导通,VD2截止,而当精密峰值电压表输入电压为负时,VD1截止,VD2导通,故运算放大器输出为放大的半波整流信号,只要运放的放大倍数足够大,就能有效克服简易峰值表因二极管压降所造成的非线性误差,本电路能测量小到几十毫伏的峰值电压。实际应用中,在矩形线圈往复运动时的制动停止再起动的过程里,电压表的数值会有少许波动。
4 结束语
本文设计的电磁环境下动生电动势的智能测量装置中,动生电动势的产生完全由单片机控制处理模块控制,通过单片机控制处理模块对送入的脉冲信号进行检测分析,自动控制电机正向、反向、停止等动作。矩形线圈的运动速度可以通过调节单片机控制处理模块产生的占空比可变脉冲信号,调节脉冲宽度对电机进行电压控制从而实现平滑无级变速,避免了由手工操作所引起的误差,可以准确快速地获得所需要的动生电动势。加入倒相器后,可以将矩形线圈整个往复运动的动生电动势通过精密峰值电压表测量出来,不会发生漏测。而且本文设计的动生电动势测量装置所用的精密峰值电压表可以测量小到几十毫伏的峰值电压,能够有效地克服简易峰值电压表因二极管压降所造成的非线性误差。
本文所设计的动生电动势智能测量装置为电动势的测量提供了设计想法与理论依据,在实际应用中的实现仍需要进一步对具体的测量装置进行选择和调试,可根据需要实现的具体电压范围选择具体参数的硬件装置,如矩形线圈、驱动电机等,以达到理想的实验目标。
电磁环境下动生电动势的智能测量装置克服了测量误差大和精度低的缺点,实现了智能化测量,弥补了现有技术的不足,具有显著的进步性。同时本装置结构简单,测试过程方便,成本较低,所用到的元器件也容易获取,故可行性很高,还可以用于教学过程中的物理实验。
参考文献
电磁感应原理中的动生电动势与感生电动势辨析
[J].
Differentiate and analysis of the induced electromotive force and motional electromotive forcein the electromagnetic induction
[J].
动生电动势的产生机理
[J].
Mechanism of production of motional electromotive force
[J].
动生电动势与感生电动势的相对性问题
[J].
Relativity of induced electromotive force and motional electromotive force
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}