


1 引言
与辨识网络匹配实现输出准确跟踪参考输入。作为一种局部逼近网络,径向基神经网可以对任意可逆被控对象进行辨识,在对象发生变化时,网络可以进行在线调整,有效解决了非线性时变系统的控制问题。同时本文增加了对网络基函数形状参数和中心向量的调整,提高了系统的响应速度。仿真结果表明了该方法的有效性及合理性。
2 电极调节系统的数学描述
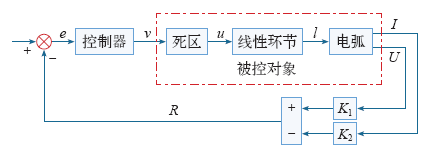
电极调节系统如图1所示。该系统包括液压系统、电弧和测量环节三部分。其中,液压模型由死区和三阶线性环节串联,电弧为静态非线性环节。
图1
2.1 液压模型
液压模型由比例阀和液压缸串联组成。比例阀含有死区,故将其视为含死区的比例环节, 液压缸的传递函数为积分加二阶振荡环节。
液压模型中,未知死区特性可表示为
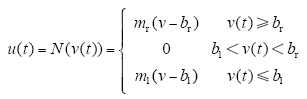
式中,mr和ml为死区斜率;br和bl为死区断点。
液压模型线性部分的传递函数经过离散化后可表示为

2.2 电弧模型
电弧模型可以表示为
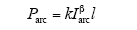
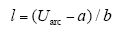
式中,Iarc为电弧电流;l为弧长;Parc为输入电弧的电能;k1为常数;Uarc为电弧电流;a为常数;b为系数,随炉温的变化而变化,冶炼初期大于冶炼后期,变化可达十倍。
电弧炉供电系统单相主回路经过简化后,如图2所示。
图2
供电系统模型可以等效为RL电路,有
式中,Up为变压器二次电压;Rd为短网电阻;Xd为短网电感;Iarc为电弧电流;Uarc为电弧电流;Pp为变压器二次功率。
2.3 测量环节
电弧炉电极调节系统的控制目标是控制电弧长度恒定, 但弧长不易直接测量, 由电弧模型可知弧长与电弧电阻关系紧密,因此采用恒阻抗原则,以间接保证弧长为一定值。定义阻抗偏差为
在冶炼过程中,电弧电流及输入电压可以测量。理想控制目标是使控制偏差为零, 电弧弧长保持恒定,即k1U - k2I = 0。
3 控制器设计
内模控制器由两组基于径向基函数的神经网络组成,结构框图如图2所示。一组用于辨识被控对象,一组在辨识网络的基础上拟合被控对象的逆,以实现输出跟踪设定值,达到控制目标。
3.1 径向基函数神经网络
径向基神经网络结构如图3所示,网络共分为输入层、隐藏层和输出层。从输入层空间到隐藏层空间的变换时非线性的,一般使用高斯函数,从隐藏层空间到输出层空间的变换是线性的。
输入层向量
隐藏层输出
网络输出
式中,x、y分别为网络输入向量与输出;cj、sj分别为高斯函数中心向量和形状参数;M为隐藏层神经元个数;wj为网络连接权系数。
3.2 辨识网络
由于电弧特性为静态非线性特性,因此根据液压模型线性部分的传递函数,将电极调节系统表示为

现构造高斯函数网络,通过学习训练,逼近函数f (·),完成动态建模,使:y(k + 1) = 
取网络输入向量

隐藏层输出同式(9)。
网络输出为

定义目标函数
网络学习的目的是通过调整网络连接权系数wj(k),使Em达到最小。现使用梯度法调整wj(k),有
式中,αj为步长,一般在0~1之间。
3.3 内模控制器设计
由于被控对象可逆,控制器取模型的逆,则可使系统消除稳态误差。取输入向量、隐层输出和控制网络输出分别为

式中, 
通过训练网络,是目标函数达到极小,与辨识网络相同,权系数可按下式调整
其中
3.4 对于形状参数与中心向量的调整
实践发现,高斯函数的形状参数与中心向量对网络的输出影响很大,只有当输入落在中心向量附近时才对输出有影响。而形状参数和中心向量往往人为选定,随机性大,所以单靠调整连接权系数来逼近对象,有时会出现收敛时间过长,逼近精度差的现象。为解决这个问题,这里使用调整基函数中心向量和形状参数的做法,该方法既不增加隐层神经元数目,有可提高逼近速度。按梯度下降法,给出调整公式


其中
式中,βj、γj、λj、μj均为步长。
3.5 控制算法步骤
下面给出内模控制算法步骤:
(1)令k = 1,初始化网络权系数、中心向量和形状参数等。
(2)由式(17)求u(k),并送对象和模型输入端。
(3)由式(12)求 
(4)由式(19)、式(20)、式(23)~式(26)调整控制网络权系数、形状参数与中心向量。
(5)由式(14)、式(21)和式(22)调整辨识网络权系数、形状参数与中心向量。
(6)k→k + 1,移位处理有关两后,转步骤(2)。
可以证明,使用式(14)和式(19)调整连接权系数w、v,可以使目标函数式(13)和式(18)收敛于全局最小;使用式(21)~式(26)调整中心向量和形状参数,可能使该参数收敛于局部最小,但仍可以加快网络的逼近速度。
4 仿真结果
电极调节系统稳定运行时, 设定二次电压有效值300V。由电弧模型式(3)和式(4)得, 初始弧长为0mm,弧长稳定在200mm。由于实际冶炼中存在塌料、钢液面波动等因素, 假设100s后又突然增长为250mm。通过电弧电压与电流的比值可以得到电弧电阻值。仿真中分别使用PID、不加入中心及形状参数调整以及加入中心及形状参数调整的内模控制方法。三种方法仿真结果如图3所示。
图3
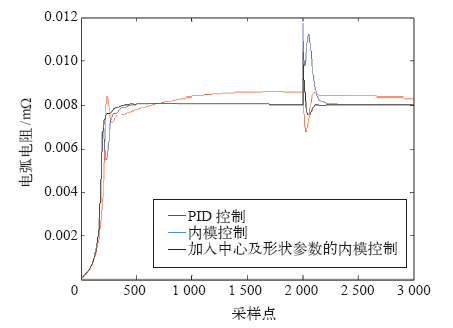
由图3可见,传统的PID控制方法在应对非线性时变对象时无法得到理想的控制效果,相应较慢且存在稳态误差;当出现扰动时,调整过于剧烈,出现较大超调。内模控制加快了响应速度,没有稳态误差,但当出现扰动时,调整仍过于缓慢。在加入中心及形状参数调整后,响应进一步加快,同时当出现扰动时,调整非常迅速。
5 结论
本文针对电弧电极调节系统中存在的时变性与非线性,设计了内模控制器。通过在线辨识被控对象及其逆达到稳定控制的目的;通过在线调整网络形状参数与中心向量,加快了输出的收敛速度及抗干扰的能力。仿真结果表明, 本文方法对电弧电极调节系统具有较好的控制效果。
参考文献
设计的理想分段条件和逐段最大温差调节法
[J].
Design ideal conditions and piecewise segmentation maximum temperature adjustment method
[J].
Modeling of SO2 conversion in the process of acid-making
[C].
SO2平衡转化率算图
[J].
SO2 equilibrium conversion rate nomogram
[J].
二氧化硫氧化反应平衡常数的计算
[J].
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
The rate and equilibrium constants for the information of a number of metmyoglobin species Mb+X (X = imidazole, imidazole-H-, 1-methylimidazole, 2-methylimidazole, 4-nitroimidazole, 2-methyl-5-nitroimidazole, pyridine, 2-, 3-, and 4-picoline) and the rates of their reduction by dithionite have been measured at 25 degrees. Several different kinds of kinetic behavior for the reduction were observed. In all cases, a rate constant for direct reaction of Mb+X with SO2- can be assessed. The data strongly support attack of SO2- on the ligand, followed by electron transfer through the pi system to the metal ion.
SO2 oxidation reaction equilibrium constants
[J].The rate and equilibrium constants for the information of a number of metmyoglobin species Mb+X (X = imidazole, imidazole-H-, 1-methylimidazole, 2-methylimidazole, 4-nitroimidazole, 2-methyl-5-nitroimidazole, pyridine, 2-, 3-, and 4-picoline) and the rates of their reduction by dithionite have been measured at 25 degrees. Several different kinds of kinetic behavior for the reduction were observed. In all cases, a rate constant for direct reaction of Mb+X with SO2- can be assessed. The data strongly support attack of SO2- on the ligand, followed by electron transfer through the pi system to the metal ion.
对二氧化硫氧化工业反应器工艺设计计算的探讨关于S型钒催化剂的动力学方程和催化剂
[J].
Discussion on the oxidation of sulfur dioxide industry reactor technology design and calculation of dynamic equations on S-type vanadium catalyst catalyst
[J].
二氧化硫催化氧化反应的绝热温升计算
[J].
Adiabatic temperature catalytic oxidation of sulfur dioxide is calculated
[J].
Clustering based adaptive crossover and mutation probabilities for genetic algorithms
[J].
Adewuya. New methods in genetic search with real valued chromosomes
[D].
A real coded genetic algorithm involving a hybrid crossover method for power plant control system design
[C].
Joseph A DeBarr. Mechanism of SO2 removal by carbon
DOI:10.1021/ef960197+ URL